KYXLGCP Grab Type Packing Machine
Product Introduction:
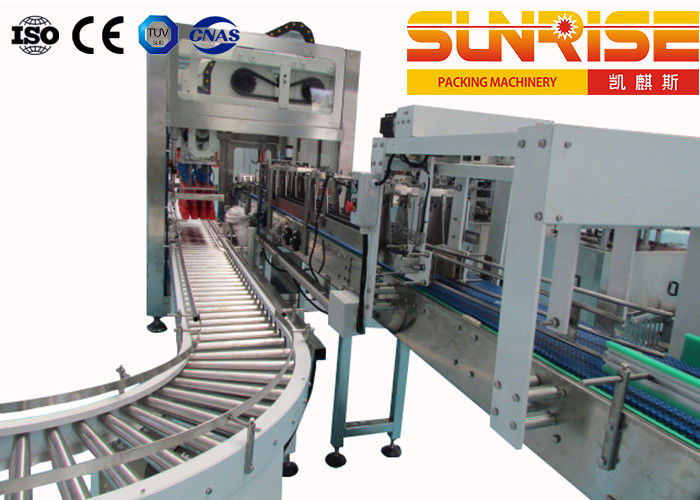
This equipment is a packing machine designed and produced by our company with pneumatic + electric operation. Its advantages are compact structure, beautiful appearance, low energy consumption, stable operation and convenient operation. The driving device is a symmetrical double rocker arm, driven by a Japanese MITSUBISHI servo motor or a three-phase asynchronous motor, and it runs smoothly.
Product Properties:
| Type: | Grab typ |
| Model number: | KYXLGCP-02/03/04/05GD, KYXLGCP-02/03/04/05GDS |
| Bottle: | 600ml PET bottle, specific reference sample |
| Box: | Formed corrugated box |
| Bottle arrangement: | according to packaging method |
| Number of grabber groups: | 2 groups/3 groups/4 groups/5 groups |
| Production capacity: | 600-2000 boxes/hour |
| Bottle arrangement: | Two rows according to the packaged product, three rows are adjustable |
| Mechanical specifications: | (length×width×height mm): 7500*1750*2500 (including conveyor belt) |
| Power consumption: | AC/3phase/50Hz/380V, 5.5Kw |
| Air consumption: | 0.6Mpa≤pressure≤0.8Mpa; 1200L/Min |
| Machine weight: | about 1500KG |
![]()
![]()
![]()
Overview:
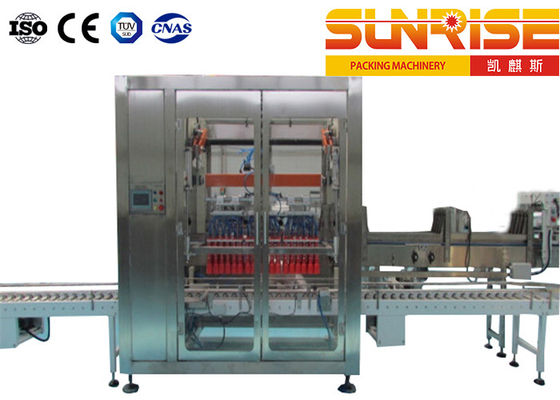
(1) Bottle grabber
According to the different appearance characteristics of the product, the bottle grabbing mechanism, two sets of bottle grabber sets, each specification
The product uses the corresponding bottle grabbing mechanism to grab the bottle. The bottle grabber group adopts an air bag type bottle grab head, which does not damage the bottle.
(2) Lifting mechanism of bottle grabbing group
The bottle grabbing group is driven by a symmetrical two-way rocker arm, that is, the rocker arm runs in the designed arc track to grab the bottle and
Packing machine action. The design mechanism is compact, the action is precise, and the operation is stable.
(3) Bottles enter the bottle storage conveyor belt on the packing machine through the bottle feeding conveyor belt, and the automatic bottle separator will transport the bottles in a single row.
The sub is automatically divided into 3 columns according to the design requirements, and the arrangement is adjusted to a suitable position
(4) The baffle plate fixes the box to the correct position by rotating the cylinder, effectively avoiding the occurrence of tank leakage or box breakage.
(5) The box is stationary when packing, and the box is supplied at the same time when the box is loaded out, which maximizes work efficiency
(6) The drive motor adopts a Sino-US joint venture variable frequency motor, which is controlled by a frequency converter
(7) Automatic bottle separator
Controlled by a micro speed-regulating motor, the supplied bottles are automatically divided into four channels for supply, effectively avoiding bottle blockages and bottle squeezing.
The occurrence of the phenomenon effectively guarantees the working efficiency of the packing machine.
(8) Bottle/box conveyor belt
The conveyor belt is driven by an asynchronous motor, and is controlled by a frequency converter and a contactor according to different conveying needs.
Automatic bottle feeding and discharging, automatic feeding and unpacking, etc.
(9) Bottle grab group:
It consists of two groups of bottle grabbers, each group can grab 15 bottles at the same time, and the two groups of bottle grabbers are driven by a cylinder to separate the spacing
(10) Safety device
The equipment is equipped with safety doors and various safety protection and detection devices to effectively ensure the safety of operators.
(11) Open touch screen operation is adopted, which is safer and simpler. Built-in various fault codes and fault solutions. When a fault occurs, the man-machine interface will display the location of the fault, as well as the cause and solution of the fault, so as to improve the work efficiency of maintenance personnel. The built-in modification interface of various contingency operating parameters can be modified in time according to the requirements of the operator to improve the working efficiency of the equipment.
Our services cover all industries and reach all parts of the world.